Discovering the Poisson Equation with SR-DEC
flex and SR-DEC, a new symbolic regression strategy developed in the paper Discovering interpretable physical models using symbolic regression and discrete exterior calculus. The 1D Poisson equation is a second-order elliptic partial differential equation that models steady-state diffusion processes such as heat conduction,
electrostatics, and gravitational potential in one spatial dimension. It is typically written as\[\frac{d^2 u(x)}{dx^2} + f(x) = 0, \quad x \in (a,b),\]where \(u(x)\)is the unknown scalar field and \(f(x)\) is a given source term. To obtain a unique solution, the equation must be complemented with appropriate boundary conditions, such as Dirichlet conditions at \(x=a\) and \(x=b\). The 1D Poisson equation admits a natural variational (weak) formulation, that is, under mild assumptions on \(f\), finding the solution of the Poisson equation is equivalent on minimizing the Dirichlet functional
\[\mathcal{F}(u) := \frac{1}{2}\int_a^b (u'(x))^2\,dx - \int_a^b f(x)\,u(x)\,dx\]under some Dirichlet boundary conditions. The mathematical language used to discretize the variational and non-variational formulation of the Poisson equation is Discrete Exterior Calculus. The (discrete) Poisson equation is then written as
\[\delta d u + f = 0 \quad \text{or equivalently} \quad \star d \star d u + f = 0,\]and its variational formulation becomes
\[\mathcal{F}(u) := \frac{1}{2}\langle du, du \rangle - \langle u, f \rangle = \frac{1}{2}\langle \delta du, u \rangle - \langle u, f \rangle.\]
For the non-variational formulation, the SR strategy discovers the LHS of the equation, while in the variational case the goal is finding the Dirichlet functional. The DEC language is handled by `dctkit <https://github.com/cpml-au/dctkit>`__.
Imports and dependencies
Main components:
dctkit: used for mesh generation, cochains, and discrete differential operators.ray: enables parallel execution of genetic programming runs.numpy: numerical array handling.
[1]:
%env RAY_ACCEL_ENV_VAR_OVERRIDE_ON_ZERO=0
env: RAY_ACCEL_ENV_VAR_OVERRIDE_ON_ZERO=0
[2]:
from dctkit.dec import cochain as C
from dctkit.mesh.simplex import SimplicialComplex
from dctkit.mesh.util import generate_line_mesh, build_complex_from_mesh
from dctkit.math.opt import optctrl as oc
from deap import gp
from flex.gp import regressor as gps
from flex.gp.util import compile_individuals
from dctkit import config
import dctkit
import numpy as np
import jax.numpy as jnp
import ray
import math
from typing import Tuple, Callable, List
import os
from flex.gp.util import load_config_data
from flex.gp.primitives import add_primitives_to_pset_from_dict
import matplotlib.pyplot as plt
[3]:
# choose precision and whether to use GPU or CPU
# needed for context of the plots at the end of the evolution
os.environ["JAX_PLATFORMS"] = "cpu"
config()
Evaluation metric
Let \(\Omega\) be the domain where the Poisson equation is defined. To evaluate each individual, we numerically compute the solution by solving the following optimization problem
where \(F_I(v, f) := ||I(v,f)|_{\Omega}||^2\) for the non-variational case, otherwise \(F_I(v, f) := I(v,f)\). Let \(u_I\) be the solution of the optimization problem, then the evaluation metric used is the standard MSE between \(u_I\) and the data \(u\).
[4]:
def eval_MSE_sol(
individual: Callable, X, y, S: SimplicialComplex, u_0: C.CochainP0, residual_mode: bool ="True"
) -> float:
num_nodes = S.num_nodes
# need to call config again before using JAX in energy evaluations to make sure that
# the current worker has initialized JAX
os.environ["JAX_PLATFORMS"] = "cpu"
config()
if residual_mode:
# objective: squared norm of the residual of the equation + penalty on Dirichlet
# boundary condition on the first node
def obj(x, y):
penalty = 100./2 * (x[0] ** 2 + (x[-1]-1)**2)
u = C.CochainP0(S, x)
f = C.CochainP0(S, y)
r = individual(u, f).coeffs.flatten()[1:-1]
total_energy = jnp.linalg.norm(r)**2 + penalty
return total_energy
else:
# objective: variational formulation of the equation + penalty on Dirichlet
# boundary condition on the first node
def obj(x, y):
penalty = 100./2 * (x[0] ** 2 + (x[-1]-1)**2)
u = C.CochainP0(S, x)
f = C.CochainP0(S, y)
total_energy = individual(u, f) + penalty
return total_energy
prb = oc.OptimizationProblem(dim=num_nodes, state_dim=num_nodes, objfun=obj)
MSE = 0.0
# set additional arguments of the objective function
# (apart from the vector of unknowns)
args = {"y": X}
prb.set_obj_args(args)
# minimize the objective
u = prb.solve(x0=u_0.coeffs.flatten(), ftol_abs=1e-12, ftol_rel=1e-12, maxeval=1000)
if y is not None:
if (
prb.last_opt_result == 1
or prb.last_opt_result == 3
or prb.last_opt_result == 4
):
MSE = np.mean(np.linalg.norm(u - y) ** 2)
else:
MSE = math.nan
if math.isnan(MSE):
MSE = 1e5
return MSE, [u]
Fitness, predict and score functions
[5]:
def get_features_batch(individ_feature_extractors, individuals_str_batch):
features_batch = [
[fe(i) for i in individuals_str_batch] for fe in individ_feature_extractors
]
indlen = features_batch[0]
return indlen
def fitness(
individuals_str: list[str],
toolbox,
X,
y,
S: SimplicialComplex,
u_0: C.CochainP0,
residual_mode: bool,
penalty: dict,
) -> Tuple[float,]:
callables = compile_individuals(toolbox, individuals_str)
indlen = get_features_batch([len], individuals_str)
fitnesses = [None] * len(individuals_str)
for i, ind in enumerate(callables):
MSE, _ = eval_MSE_sol(ind, X, y, S, u_0, residual_mode)
# add penalty on length of the tree to promote simpler solutions
fitnesses[i] = (MSE + penalty["reg_param"] * indlen[i],)
return fitnesses
def predict(
individuals_str: list[str],
toolbox,
X,
S: SimplicialComplex,
u_0: C.CochainP0,
residual_mode: bool,
penalty: dict,
) -> List:
callables = compile_individuals(toolbox, individuals_str)
u = [None] * len(individuals_str)
for i, ind in enumerate(callables):
_, u[i] = eval_MSE_sol(ind, X, None, S, u_0, residual_mode)
return u
def score(
individuals_str: list[str],
toolbox,
X,
y,
S: SimplicialComplex,
u_0: C.CochainP0,
residual_mode: bool,
penalty: dict,
) -> List:
callables = compile_individuals(toolbox, individuals_str)
MSE = [None] * len(individuals_str)
for i, ind in enumerate(callables):
MSE[i], _ = eval_MSE_sol(ind, X, y, S, u_0, residual_mode)
return MSE
Training Pipeline
We consider a 1D spatial domain discretized using a simplicial complex. The mesh is generated as a line mesh and then converted into a SimplicialComplex object, which is required by the DEC framework.
To validate the symbolic regression pipeline, we generate data from an exact solution, that is:
This function is sampled on the mesh vertices and stored as a primal 0-cochain. Using a known analytical solution allows us to:
compute the exact forcing term,
assess whether the learned symbolic model recovers the correct operator.
[6]:
filename = "sr_dec.yaml"
residual_mode = True
regressor_params, config_file_data = load_config_data(filename)
# generate mesh and dataset
mesh, _ = generate_line_mesh(num_nodes=11, L=1.0)
S = build_complex_from_mesh(mesh)
S.get_hodge_star()
x = S.node_coords
num_nodes = S.num_nodes
# generate training and test datasets
# exact solution = x²
u = C.CochainP0(S, np.array(x[:, 0] ** 2, dtype=dctkit.float_dtype))
# compute source term such that u solves the discrete Poisson equation
# Delta u + f = 0, where Delta is the discrete Laplace-de Rham operator
f = C.laplacian(u)
f.coeffs *= -1.0
X_train = np.array(f.coeffs.ravel(), dtype=dctkit.float_dtype)
y_train = np.array(u.coeffs.ravel(), dtype=dctkit.float_dtype)
# initial guess for the unknown of the Poisson problem (cochain of nodals values)
u_0_vec = np.zeros(num_nodes, dtype=dctkit.float_dtype)
u_0 = C.CochainP0(S, u_0_vec)
# define primitive set for the residual of the discrete Poisson equation
if residual_mode:
pset = gp.PrimitiveSetTyped("RESIDUAL", [C.CochainP0, C.CochainP0], C.CochainP0)
else:
pset = gp.PrimitiveSetTyped("RESIDUAL", [C.CochainP0, C.CochainP0], float)
# rename arguments of the residual
pset.renameArguments(ARG0="u")
pset.renameArguments(ARG1="f")
pset = add_primitives_to_pset_from_dict(pset, config_file_data["gp"]["primitives"])
penalty = config_file_data["gp"]["penalty"]
common_params = {"S": S, "u_0": u_0, "penalty": penalty, "residual_mode": residual_mode}
gpsr = gps.GPSymbolicRegressor(
pset_config=pset,
fitness=fitness,
score_func=score,
predict_func=predict,
print_log=True,
common_data=common_params,
seed_str=None,
save_best_individual=True,
save_train_fit_history=True,
output_path="./",
remove_init_duplicates=True,
**regressor_params
)
gpsr.fit(X_train, y_train, X_val=X_train, y_val=y_train)
u_best = gpsr.predict(X_train)
fit_score = gpsr.score(X_train, y_train)
gpsr.save_best_test_sols(X_train, "./")
ray.shutdown()
2026-02-10 11:30:36,717 INFO worker.py:1998 -- Started a local Ray instance. View the dashboard at http://127.0.0.1:8265
Generating initial population(s)...
Removing duplicates from initial population(s)...
DONE.
DONE.
Evaluating initial population(s)...
DONE.
-= START OF EVOLUTION =-
fitness size
------------------------------ ------------------------------
gen evals min avg max std min avg max std
1 20 1.8333 7.5254 26.8333 9.6545 3 8.15 19 4.0407
Best individuals of this generation:
SubCP0(f, f)
2 20 1.8333 2.1762 2.9333 0.3111 3 6.35 14 2.9711
Best individuals of this generation:
SubCP0(f, f)
3 20 1.8332 1.9033 2.0333 0.0954 3 3.8 5 0.9798
Best individuals of this generation:
SubCP0(delP1(cobP0(u)), f)
4 20 1.8332 1.8333 1.8333 0 3 3.1 5 0.4359
Best individuals of this generation:
SubCP0(delP1(cobP0(u)), f)
5 20 1.6399 1.814 1.8333 0.0578 3 3.9 13 2.3216
Best individuals of this generation:
SubCP0(delP1(cobP0(u)), AddCP0(u, SubCP0(AddCP0(u, u), SubCP0(f, u))))
6 20 1.5137 1.7788 1.8333 0.0977 3 4.9 13 3.1922
Best individuals of this generation:
SubCP0(delP1(cobP0(AddCP0(u, u))), SubCP0(f, u))
7 20 0.7063 1.6776 1.8333 0.2499 3 6.7 13 3.1796
Best individuals of this generation:
AddCP0(AddCP0(f, u), delP1(cobP0(u)))
8 20 0.7063 1.4366 1.6417 0.3383 7 9.1 13 2.6439
Best individuals of this generation:
AddCP0(AddCP0(f, u), delP1(cobP0(u)))
9 20 0.7063 1.2616 1.6417 0.3852 7 9.5 13 2.4393
Best individuals of this generation:
AddCP0(AddCP0(f, u), delP1(cobP0(u)))
10 20 0.5 0.9759 1.5137 0.3251 5 7.9 13 1.6093
Best individuals of this generation:
AddCP0(f, delP1(cobP0(u)))
-= END OF EVOLUTION =-
The best individual is AddCP0(f, delP1(cobP0(u)))
The best fitness on the training set is 0.5
String of the best individual saved to disk.
Training fitness history saved to disk.
Best individual solution evaluated over the test set saved to disk.
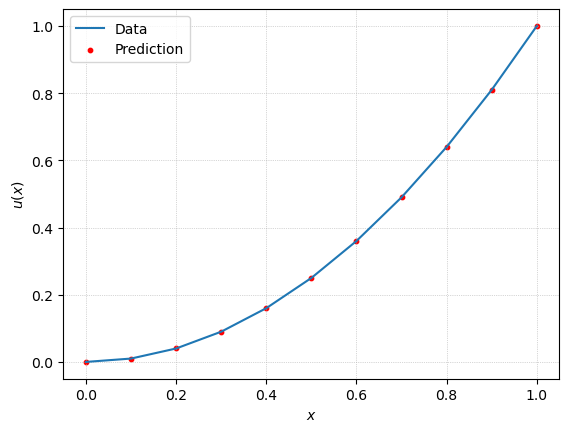
Plots
[7]:
plt.plot(x[:,0], y_train, label="Data")
plt.scatter(x[:,0], u_best, c="r", s=10, label="Prediction")
plt.xlabel(r"$x$")
plt.ylabel(r"$u(x)$")
plt.grid(True, linestyle=":", linewidth=0.5)
plt.legend()
plt.show()